







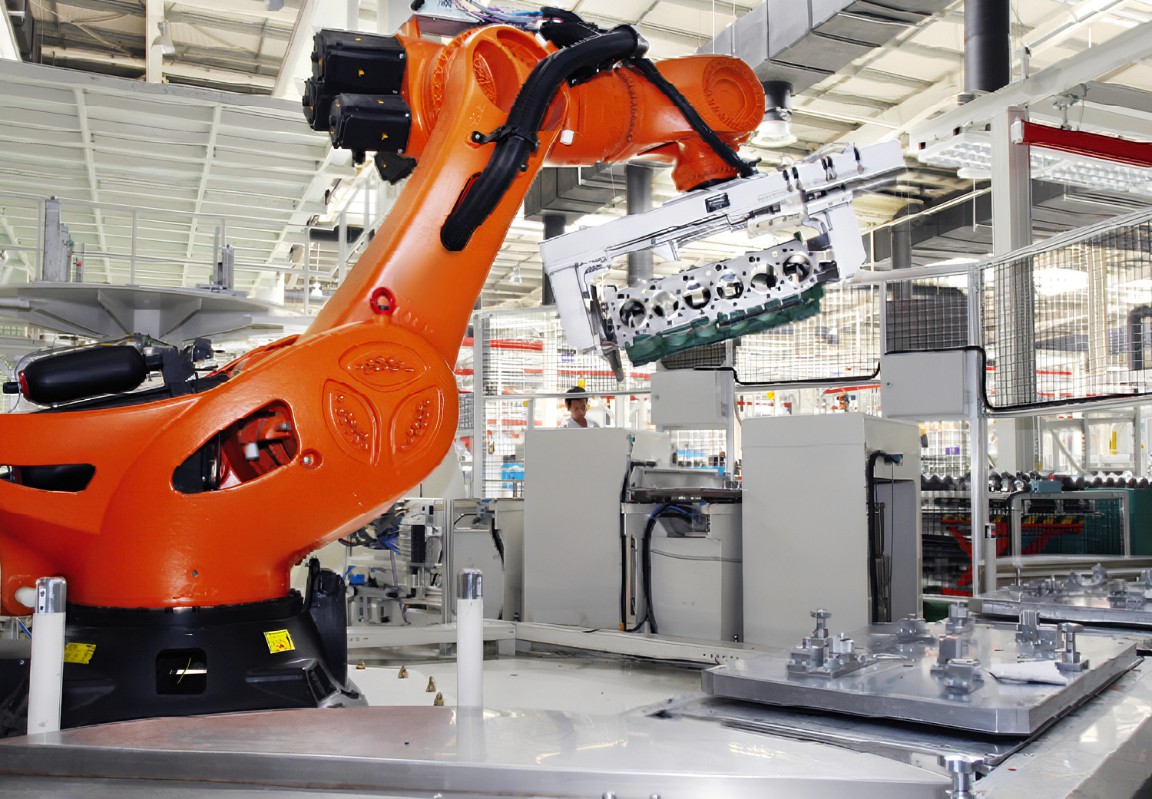
Currently, there are two main types of gearboxes widely used in articulated robots: RV gearboxes and harmonic drives. So, what are the differences between the two?
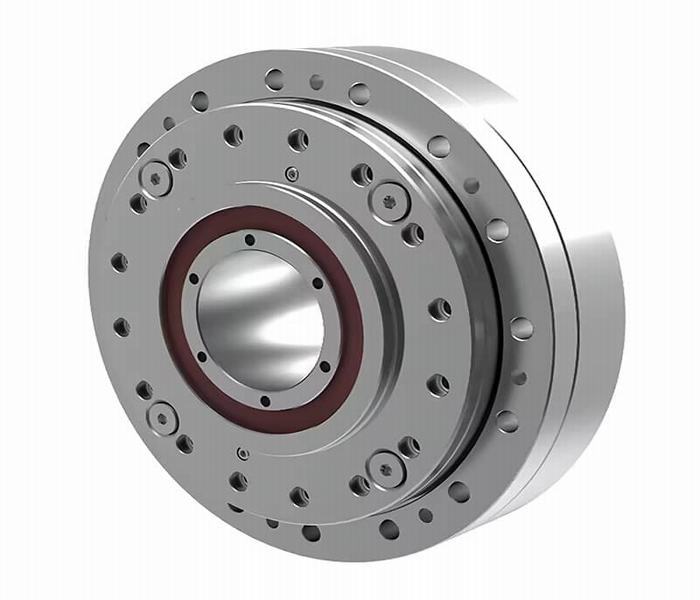
RV gearboxes are generally used in the leg, waist, and elbow joints of robots that require high torque. Typically, RV gearboxes are used in the 1-2-3 axes of industrial robots with heavy loads. Compared to harmonic drives, RV gearboxes have higher fatigue strength, rigidity, and lifespan. Unlike harmonic drives, which experience a significant decrease in motion accuracy over time, RV gearboxes have the disadvantage of being heavy and larger in size.
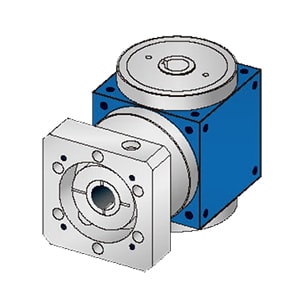
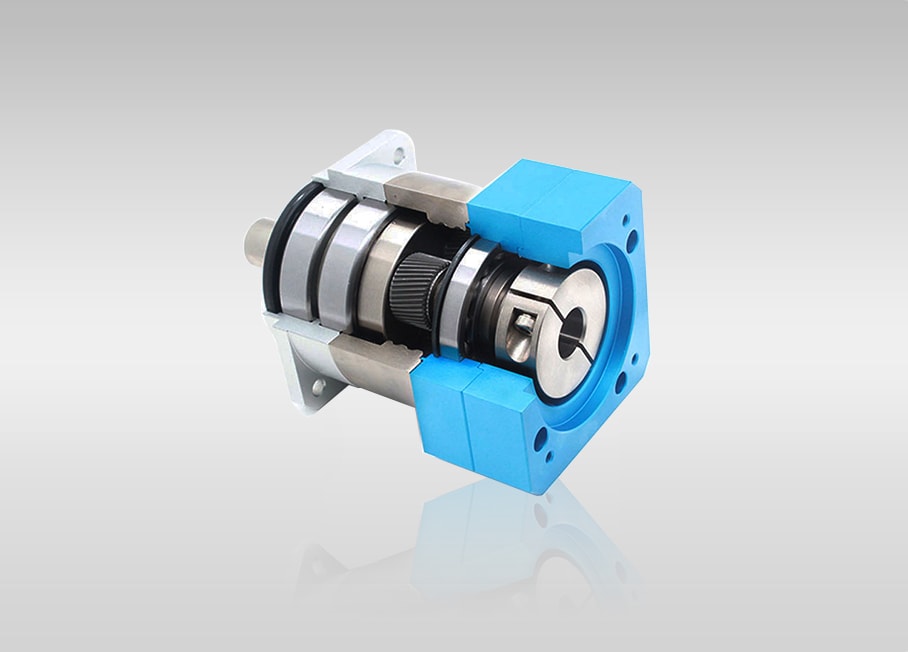
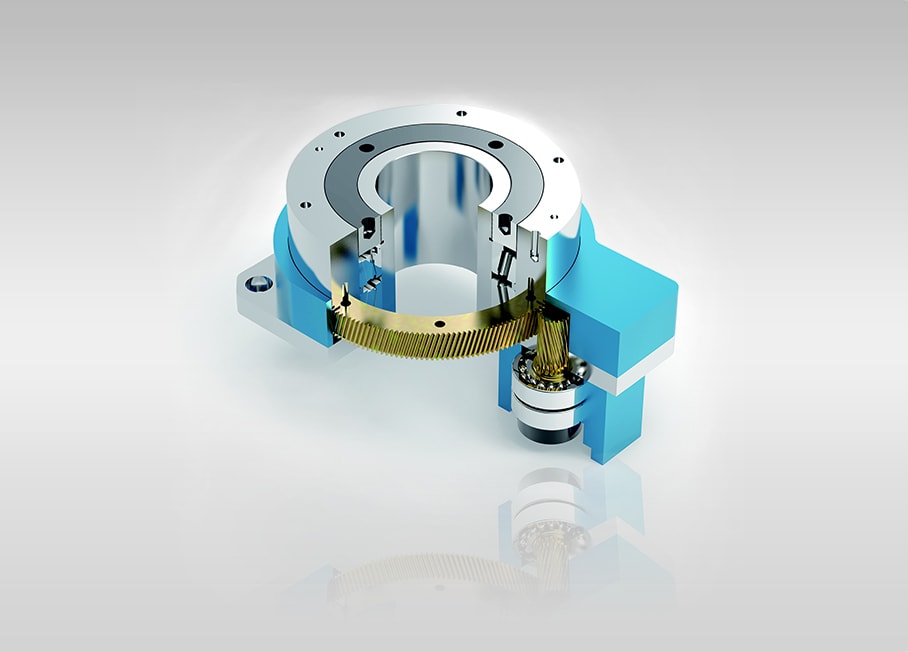
Harmonic drives, on the other hand, are commonly used in industrial robots with lighter loads or in the end joints of large robots. Since harmonic drives are a type of gear mechanism, they have the advantages of small size, light weight, high load-bearing capacity, high motion accuracy, and large single-stage gear ratio.
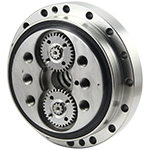
Both RV gearboxes and harmonic drives are types of cycloidal gear mechanisms. The difference lies in one critical gear in harmonic drives, which is flexible and undergoes repeated high-speed deformation. Therefore, it is relatively fragile, with limited load-bearing capacity and lifespan. RV gearboxes typically use needle wheel mechanisms. In the past, harmonic drives used involute tooth profiles, but now some manufacturers have adopted double-arc tooth profiles, which are more advanced than involute profiles.



Comment ( )