 English
English Deutsch
Deutsch Русский
Русский Español
Español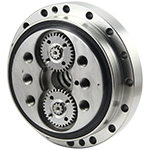







Industrial robots typically need to perform repetitive tasks, and in order to ensure that they can accurately complete tasks and improve work quality, there is a high demand for precise repeatability in industrial robot positioning. As a core component of robots, the application of robot reducers can enhance and guarantee the precision of industrial robot operations to a certain extent. So, what are the common types of reducers used in industrial robots?
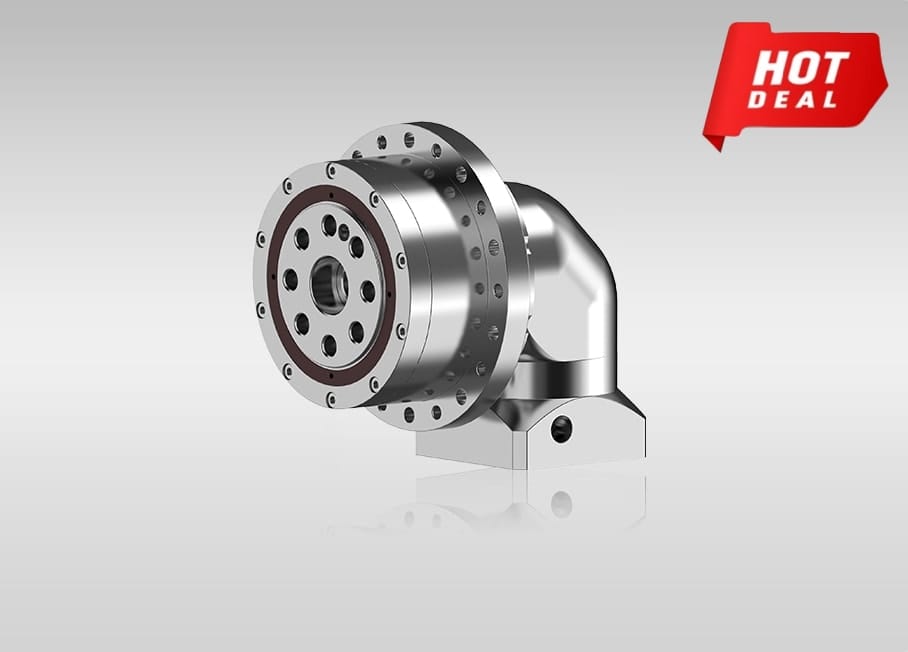
1. Miniature Cycloidal Reducer
The miniature cycloidal reducer is a new type of power transmission system, designed based on a new reduction principle and newly developed radial and axial output bearings. By adopting a differential reduction mechanism and thin cross roller bearings, it achieves a compact shape, contributing to the compact size of the equipment. With the multiple engagement of precision cycloidal gears and high-precision needle rollers, higher transmission accuracy is achieved while maintaining small size and large speed ratio. Its characteristics, such as small size, high rigidity, and low backlash, are widely applied in industrial robot joints.

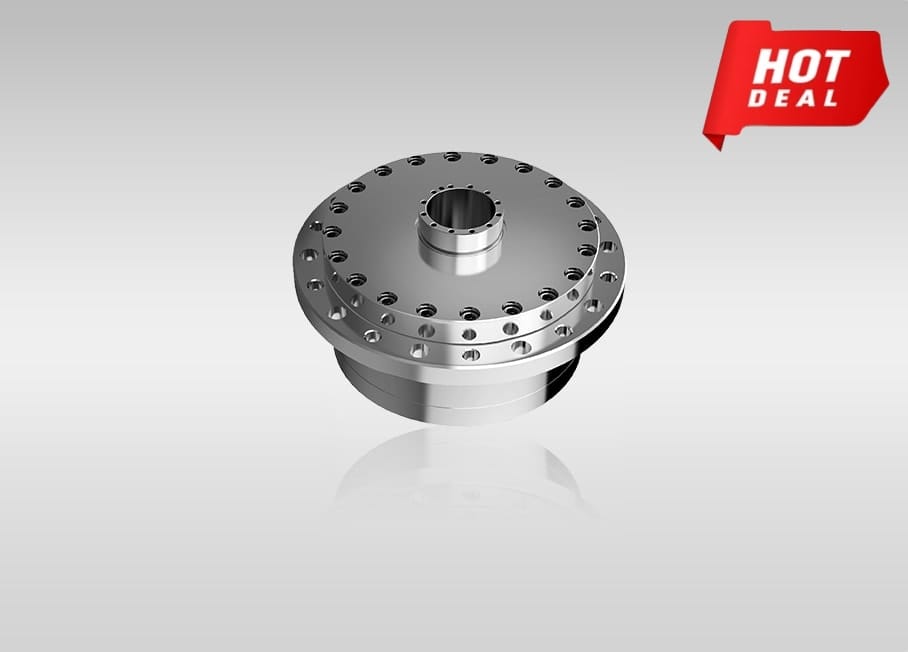
2. Harmonic Drive Reducer
The harmonic drive reducer is usually composed of components such as a wave generator, a flex spline, a circular spline, and a flexible bearing. It is generally used in industrial robots with relatively light loads. It has the advantages of high motion accuracy, large transmission ratio, small mass, small volume, and small transmission inertia. The harmonic drive reducer also has significant driving advantages, such as small size, fewer components, a single engine with a range of 50-4000%, and a transmission efficiency of 92-96%.

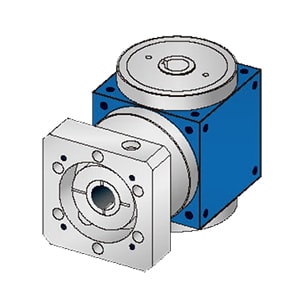
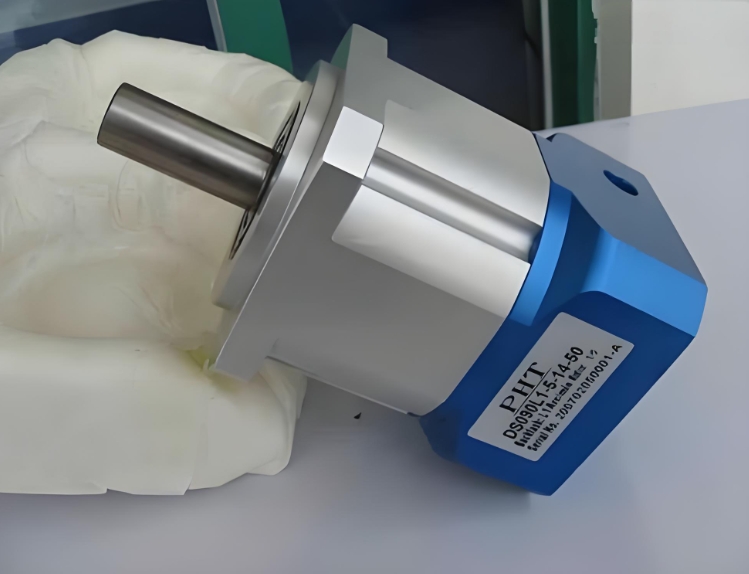
3. Planetary Gear Reducer
In short, the planetary gear set in a planetary gear reducer revolves around the sun gear, hence the name planetary gear reducer. Robot planetary gear reducers can change the development speed by engaging gears with different structural sizes. The planetary gear reducer has the effect of significantly reducing speed and increasing output torque. By combining the motor with the robot reducer, torque is increased. When the load is heavy, increasing the power of the servo motor is not cost-effective. Therefore, a reducer with an appropriate reduction ratio is selected within the required speed range. When the motor passes through the robot reducer, the speed of the output shaft decreases and the torque increases to meet the working requirements.

The above is an introduction to the commonly used reducers in industrial robots. For more information on robot reducers, please follow our updates.




Quote Now