 English
English Deutsch
Deutsch Русский
Русский Español
Español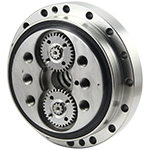







The integration of "motor + gearbox" is expected to become the primary power combination for the major joints of humanoid robots. The demand for gearboxes will be opened up, while the finger joints, constrained by factors such as volume and weight, may adopt a more lightweight technology path.
As core components of robots, the localization rates of gearboxes, servo systems, and controllers are currently only 36.53%, 24.50%, and 31.20%, respectively. These three parts are the core guarantees for precise robot motion and play a decisive role in the final performance of the products, making them the main focus of the localization process.
Among the components, gearboxes have the highest proportion and serve as the intermediate mechanism connecting the power source and the actuator. They have the function of matching speeds and transmitting torque, and can be divided into general-purpose gearboxes and precision gearboxes.
General-purpose gearboxes have lower control precision but can meet the basic power transmission needs of mechanical equipment. On the other hand, precision gearboxes have high manufacturing requirements and technical difficulties. They offer advantages such as high precision, reliability, stability, and small backlash. They are applied in high-end fields such as robots and CNC machine tools.
Overview of the precision gearbox industry:
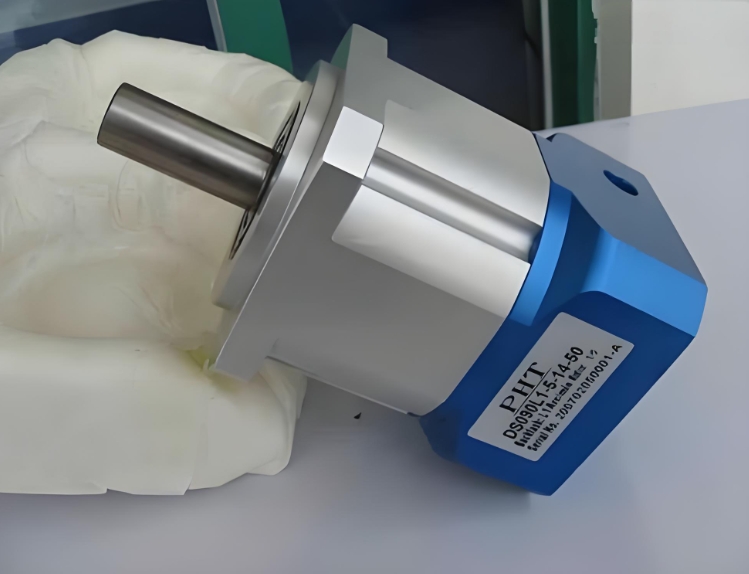
Precision gearboxes, similar to the "tendons" of industrial machinery, connect servo motors and actuators. Since motors generally have high speed and low torque, the core function of gearboxes is to reduce speed and increase torque, thereby precisely adjusting the rotation angle of the machine.
Precision gearboxes are devices used in conjunction with motors, and their usage in humanoid robots is generally consistent with the number of servo motors, which will be much higher than in existing industrial robots (where a single gearbox is used for 2-6 machines).
Precision gearboxes are specific mechanical components with their own set of technologies, equipment, and processes. The gearboxes, motors, and sensors produced based on this form the joint units of the robot. These joint units then form the robot, which is ultimately used by the user.
The technological ecosystem of precision gearboxes includes three levels: the technology of the gearboxes themselves, the synergy between the gearboxes and the joint units, and the synergy between the gearboxes and the overall performance of the robot.
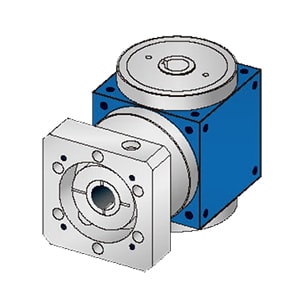
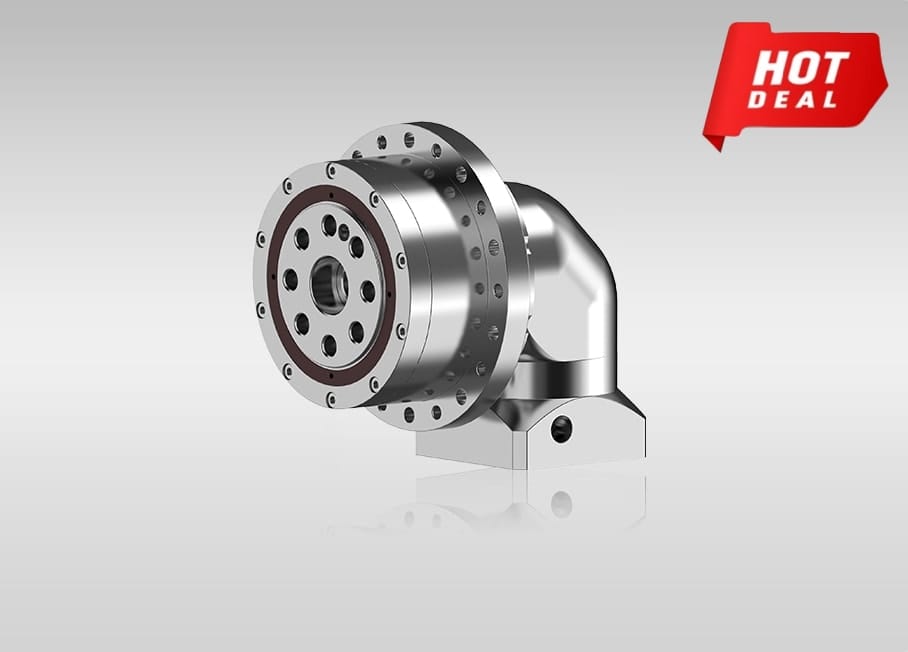
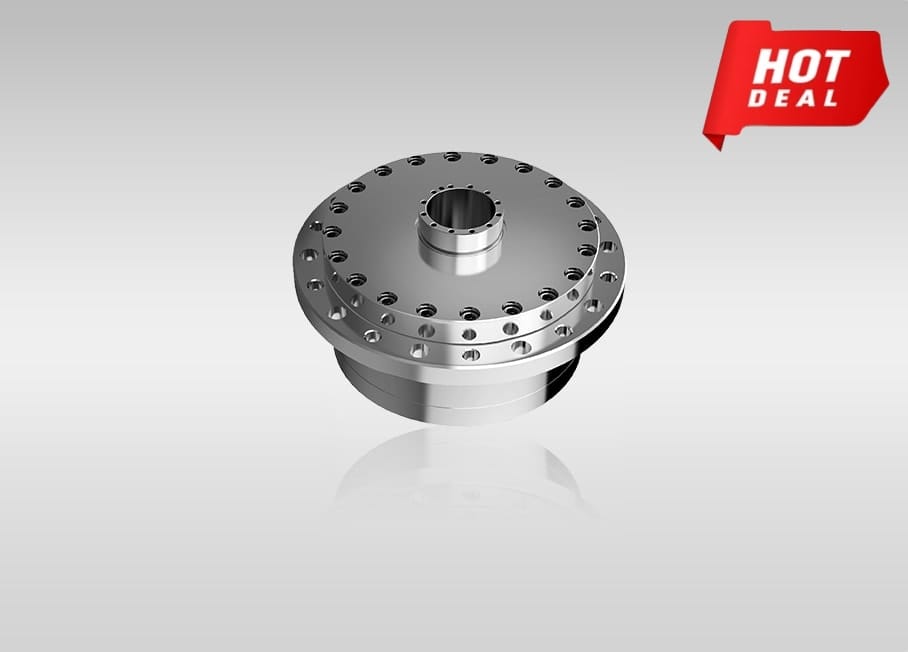
Precision gearboxes mainly include harmonic gearboxes and RV gearboxes. Overall, due to the limited load-bearing capacity of harmonic gearboxes but smaller size and weight, and the higher load-bearing capacity of RV gearboxes but larger size and weight, these two types of gearboxes present a complementary relationship in the short term rather than a substitution.
In general, industrial robots with a load of less than 10 kg mainly use harmonic gearboxes. For high-load industrial robots with a load of 10-20 kg, harmonic gearboxes can be used for the forearm and wrist joints. Even for loads above 30 kg, harmonic gearboxes can be used for lighter load end joints. RV gearboxes are more commonly used for heavy-load parts such as the base, upper arm, and shoulder.
According to MIR data, benefiting from the high prosperity of downstream industries such as industrial robots, the sales of harmonic and RV gearboxes in China have increased from 543,000 units in 2019 to 1,263,000 units in 2022, with a CAGR of 32.5% during this period. It is expected that from 2023 to 2025, the sales will continue to grow at a CAGR of 16.8%, exceeding 2 million units. Structurally, industrial robots are the largest application field for gearboxes, accounting for 79.7% in 2022.





Quote Now