 English
English Deutsch
Deutsch Русский
Русский Español
Español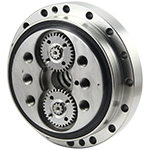







With the outbreak of artificial intelligence, the global "machine-to-human" process is accelerating, and humanoid robots have become a hot new trend in the robotics industry. The deceleration mechanism applied to robot joints has also ushered in a new round of development opportunities.
As we all know, the deceleration mechanism is the intermediate device connecting the servo motor and the execution mechanism, and the core component of robot motion, the "joint," is composed of it.
Each joint requires different deceleration mechanisms, and the most commonly used one is the harmonic reducer. However, according to recent reports, there is a possibility of changes in the solution for some rotating joints of the hottest humanoid robots at present, and the main variable link is that the planetary reducer may replace the harmonic reducer. It can be seen that the planetary reducer will become a key factor restricting the development of the robotics industry.
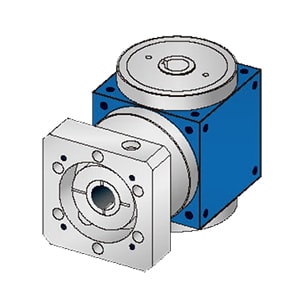
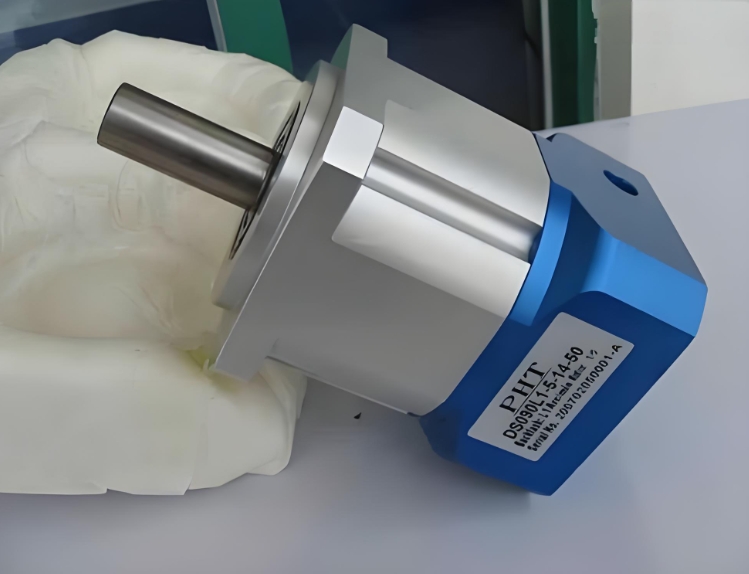
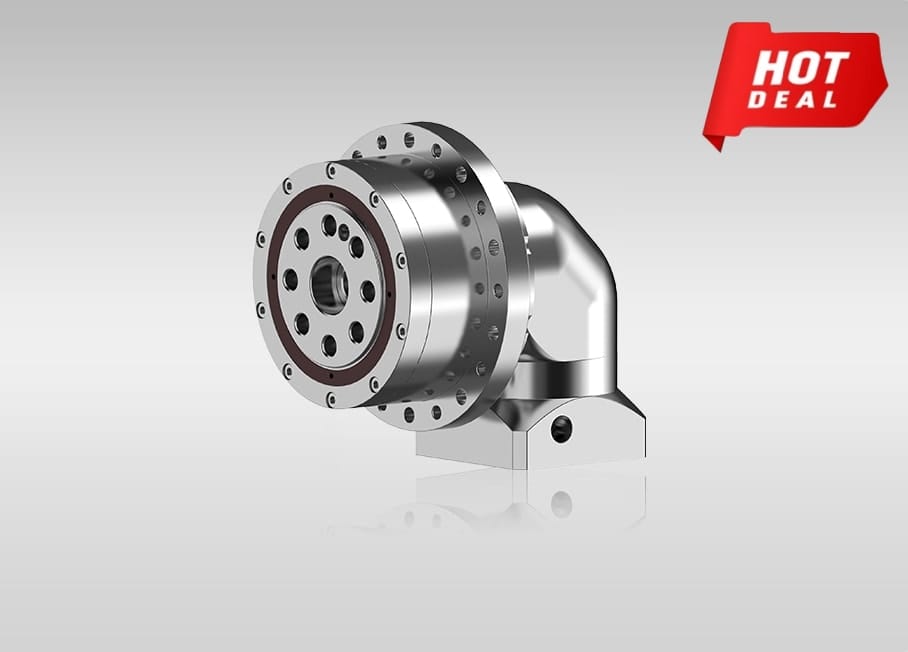
Planetary reducers applied to humanoid robots need to meet the characteristics of high repeatability positioning accuracy, high rigidity, and high output torque. Pinion's DA series of planetary reducers applied to humanoid robots are designed for high-precision requirements, with the minimum backlash reaching ≤1 arc minute.
The product combines the characteristics of low backlash, low noise (58-65 decibels), and high torque, which can provide excellent control accuracy for humanoid robots, meet the requirements of high repeatability positioning accuracy, high rigidity, and high output torque of humanoid robots.
The specific advantages are as follows:
1. Compact structure
Pinion planetary reducers fully utilize space, design bearings and gear ratios in limited space, make the product smaller in volume than traditional reducers, and save space.
2. Output shaft and planetary carrier are integrally formed
The integrally formed planetary carrier and output shaft can provide excellent torsional rigidity. After precision processing, the gear set is not easy to be eccentric, which can reduce interference, reduce wear and noise. At the same time, a larger span is used to configure bearings to disperse bearing loads, once again strengthening the torsional rigidity and radial load capacity of the planetary reducer.
3. High efficiency
When the planetary gear set is in operation, it will be in a completely tight meshing state, reducing the situation where gear collision or local meshing causes gear damage. The completely tight meshing characteristics make the efficiency loss of each gear transmission segment only 3%. This type of transmission method can ensure high transmission efficiency during the process of kinetic energy input from the reducer to the mechanism end, avoiding mechanical losses caused by internal gear friction and sliding.
4. High axial and radial load capacity
The output shaft of the planetary reducer adopts a large span design, and the bearings are configured at both ends of the output shaft. This design can effectively disperse the force acting on the output shaft, reduce the bearing load, and in other words, strengthen the axial and radial load capacity that can be withstood in the same size.
5. High Strength
Pinion's planetary gearbox has a very strong and stable gear set, with the thickness of the gears dispersing the load. The large-span bearing group provides a stable structure; the precise gear set, with tight meshing, distributes the load to each planetary gear to withstand torque loads.
6. High Stability
Precision machining ensures that the planetary gearbox maintains coaxiality and concentricity, and the use of large-span bearings design provides the product with excellent stability.
As the general agent for Pinion in the southern region of China, Fubao Mechanical and Electrical Technology has been closely cooperating with Pinion for over 30 years. We have an absolute advantage in terms of delivery time and price, and we will spare no effort to promote the healthy development of the domestic robotics industry.





Quote Now