 English
English Deutsch
Deutsch Русский
Русский Español
Español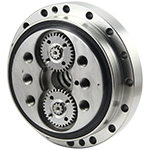







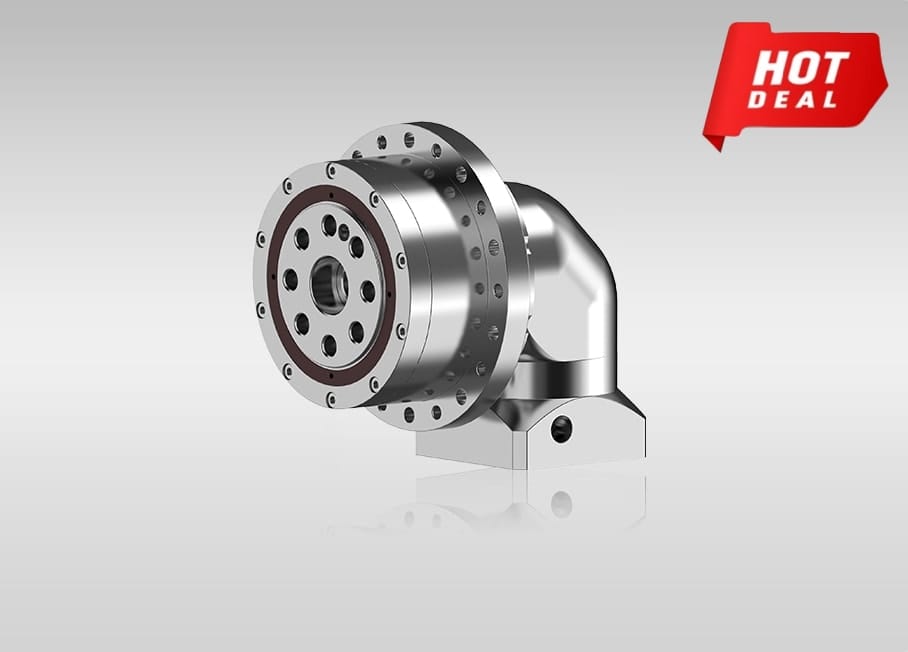
Planetary gear reducer: The main transmission structure is: planetary gear, sun gear, outer ring gear.
Due to the structure of the planetary reducer, the minimum single-stage reduction is 3, and the maximum is generally not more than 10. The common reduction ratios are: 3, 4, 5, 6, 8, 10. The number of reducer stages generally does not exceed 3, but some large reduction ratio custom reducers have 4 stages.
Compared with other reducers, planetary gear reducers have high rigidity, high precision (within 1 minute in a single stage), high transmission efficiency (97%-98% in a single stage), high torque/volume ratio, and lifelong maintenance-free characteristics.
The rated input speed of the reducer can reach up to 18,000 rpm (depending on the size of the reducer, the larger the reducer, the lower the rated input speed). The output torque of industrial planetary gear reducers generally does not exceed 2000 Nm, and specially designed super large torque planetary gear reducers can reach over 10,000 Nm. The working temperature is generally around -25°C to 100°C, and the working temperature can be changed by changing the lubricating grease.
Number of stages: The number of sets of planetary gears. Since one set of planetary gears cannot meet the requirements of a large transmission ratio, sometimes 2 or 3 sets are needed to meet the requirements of a large transmission ratio. Due to the increase in the number of planetary gears, the length of the 2-stage or 3-stage reducer will increase, and the efficiency will decrease.
Backlash: Fix the output end, rotate the input end clockwise and counterclockwise, and generate a small angular displacement at the input end when the input end produces the rated torque +-2% torque. This angular displacement is the backlash. The unit is "minute", which is one-sixtieth of a degree. It is also called backlash by some people.
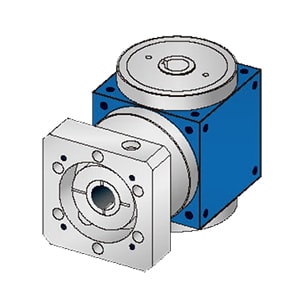
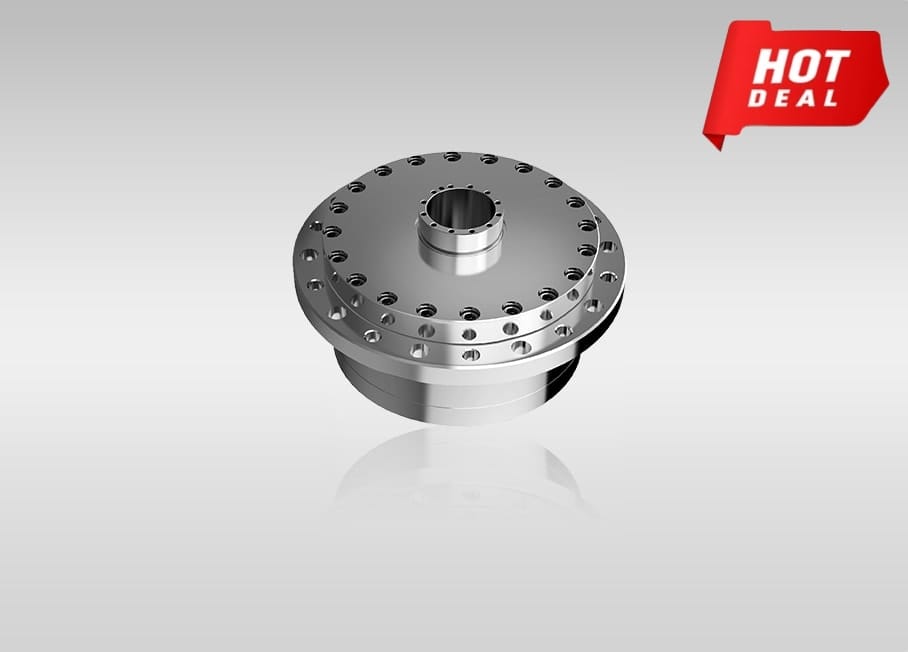
Planetary cycloid pinwheel reducer: The entire transmission device can be divided into three parts: input part, reduction part, and output part. An eccentricity sleeve with a 180° offset is installed on the input shaft, and two rolling pin shafts called swing arms are installed on the eccentricity sleeve, forming an H mechanism.
The center hole of the two cycloidal wheels is the raceway of the swing arm shaft bearing on the eccentric sleeve, and it meshes with a set of annularly arranged needle teeth on the cycloidal wheel and the needle gear to form an internal meshing reduction mechanism with a tooth difference of one tooth. (In order to reduce friction, in reducers with a small speed ratio, the needle gear is equipped with a needle gear sleeve).
When the input shaft rotates one revolution with the eccentric sleeve, the motion of the cycloidal wheel becomes a planar motion that has both revolution and self-rotation due to the characteristics of the tooth profile curve of the cycloidal wheel and its limitation by the needle teeth on the needle gear.





Quote Now