 English
English Deutsch
Deutsch Русский
Русский Español
Español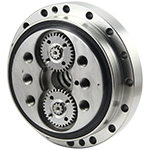







The core components of collaborative robots mainly include the electrical control system, servo motors, and gear reducers. Due to the high requirements for precision, reliability, and stability in collaborative robots, the gear reducers used for collaborative robots also need to meet these high standards.
Currently, there are very few gear reducers available on the market that can meet the requirements of collaborative robots. As a result, collaborative robots generally have slow speeds, low loads, and poorer rigidity and repeatability compared to traditional robots.
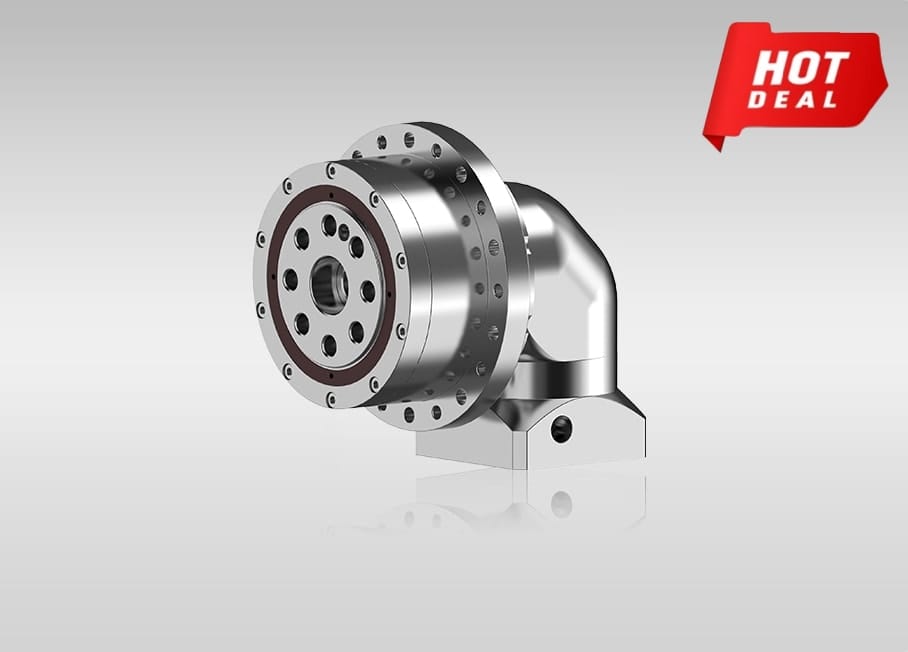
To address this challenge, the WF series cycloidal gear reducer comes into play!
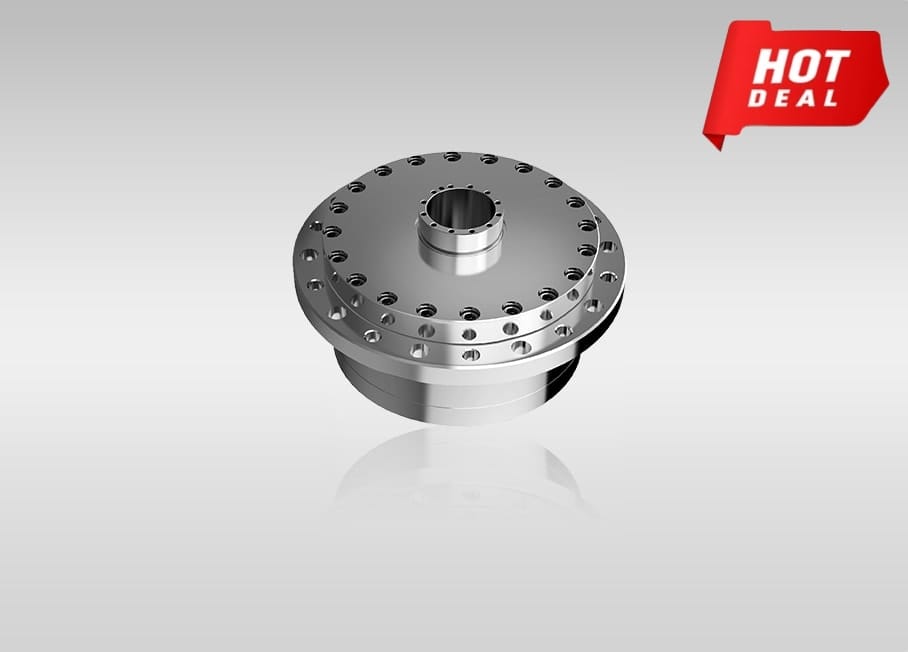
The WF series cycloidal gear reducer is designed to pursue the highest performance standards and adopts a differential gear mechanism (eccentric swing shaft) to achieve high torsional rigidity and allowable torque.
Additionally, it utilizes an ultra-thin cross roller bearing integrated with the output shaft, ensuring not only a compact size but also high torque rigidity. Even with changes in the reduction ratio, the gear meshing remains nearly constant, providing constant allowable torque.
The exceptional performance of the WF series cycloidal gear reducer is attributed to its high-wear and high-precision components, manufactured in compliance with the ISO9001 quality management system, which guarantees its reliable operation.
To further enhance the performance of the WF series cycloidal gear reducer, key components are sourced from imported brands.
The main core components are as follows:
-
Cycloidal gears: Designed with R-arc tooth profile, they distribute forces more evenly and are more resistant to impact. Sourced from Taiwan to ensure the stability and precision of the manufacturing process.
-
Output bearings: Japanese IKO cross roller bearings are used, achieving minimal requirements for operational precision (≤1 arc minute) and face runout (0.008-0.01mm).
-
Support bearings: Thin-walled ball bearings are replaced with cylindrical roller bearings, providing the gear reducer with stronger load-bearing capacity.
-
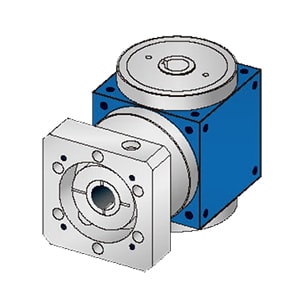
Integrated mechatronic design: The integration design allows for direct installation of equipment and motors on the cycloidal gear reducer, eliminating the need for additional bearings and enhancing convenience of use.
-
In conclusion, it is evident that the exceptional performance of the WF series cycloidal gear reducer is backed by solid reasons. Our customers, including those who have used this gear reducer for collaborative robots, have given it 100% positive feedback, making them our best advocates!





Quote Now