 English
English Deutsch
Deutsch Русский
Русский Español
Español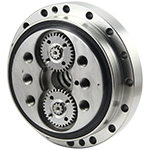







Precision gearboxes are essential components for various types of robots
It includes articulated robots, parallel robots, exoskeleton robots, and machine tools. These gearboxes serve as the intermediate devices connecting servo motors and actuators, and they constitute the core components of the robot's motion. Each joint of a robot requires a different type of gearbox. Let's take a look at the introduction of robot planetary gearboxes.
The core components of a robot mainly consist of the robot planetary gearbox, AC/DC servo motors, and controllers. From a cost perspective, the cost structure of the global robotics industry is approximately 35% for robot gearboxes, 20% for servo motors, 15% for control systems, and machining mechanisms account for only about 15%, with the remaining portion mainly being application programs. Based on the above data, it can be seen that planetary gearboxes are a key factor restricting the development of the robot industry.
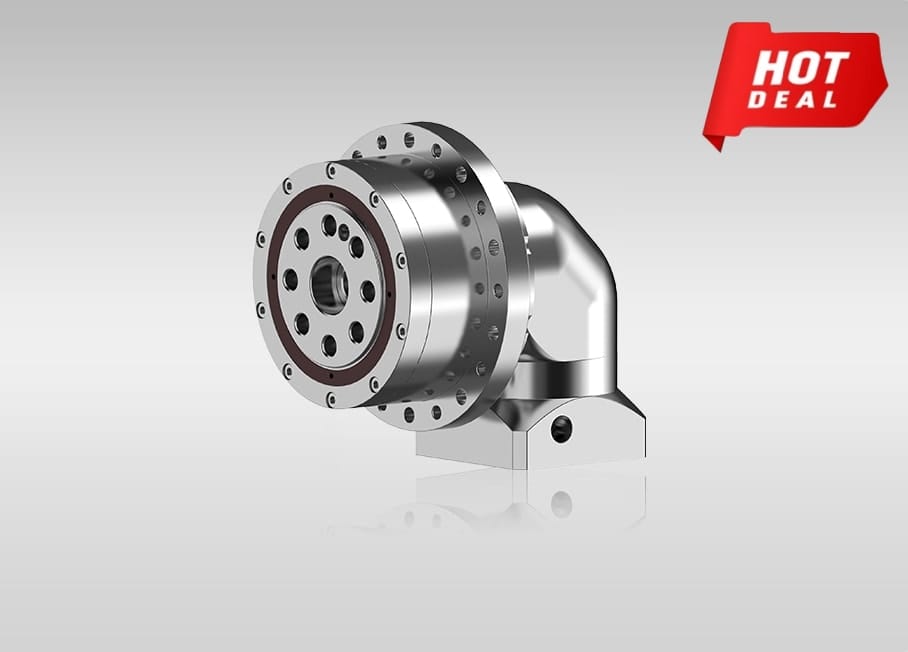
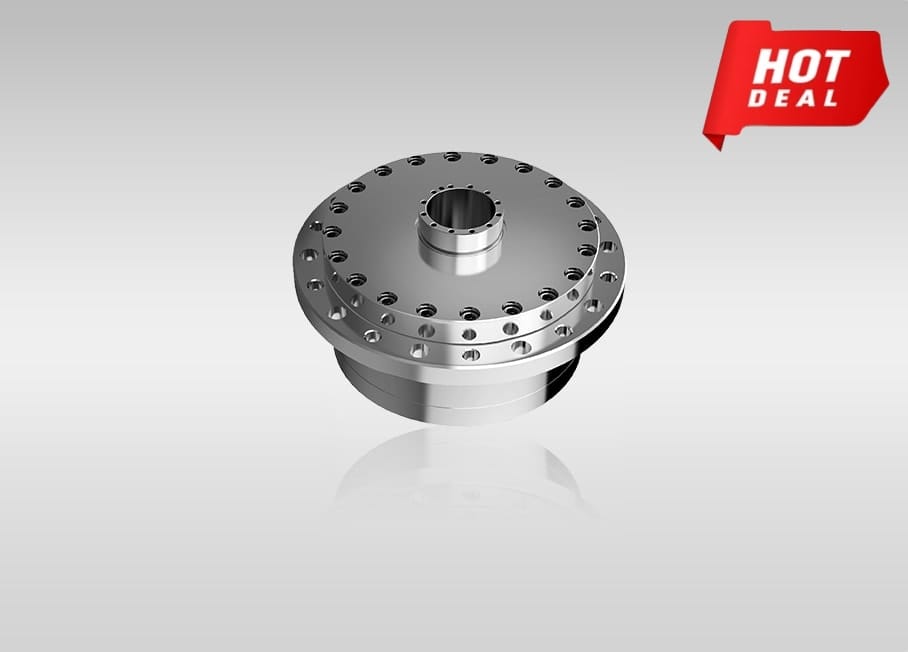
Robot planetary gearboxes can change the development speed by meshing with gears of different structural sizes. Precision servo planetary gearboxes have the effect of significantly reducing speed and increasing output torque. By combining the motor with the robot gearbox, the torque is increased. When the load is heavy, increasing the power of the servo motor is not cost-effective. Therefore, a motor with an appropriate reduction ratio should be selected within the required speed range. When the motor passes through the robot gearbox, the rotational speed of the output shaft decreases and the torque increases to meet the working requirements.
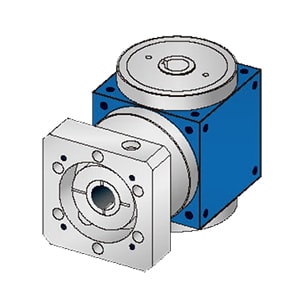
There are two ways to connect the robot planetary gearbox:
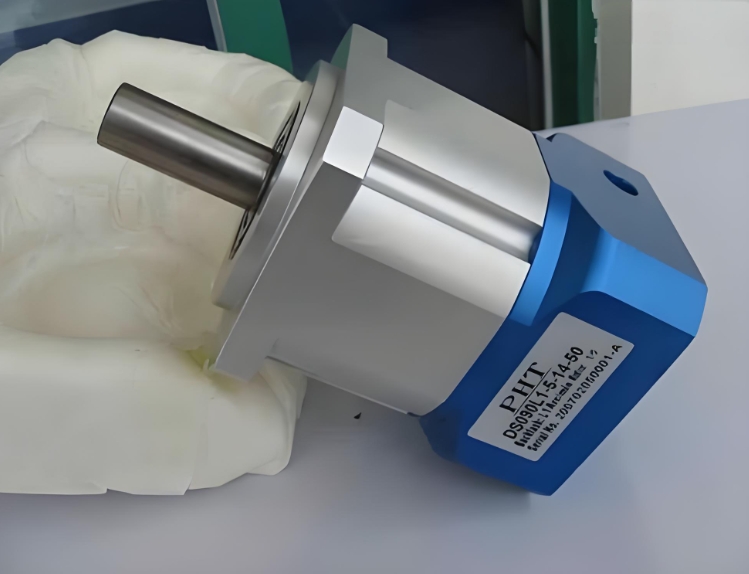
One way is to grip the servo control motor. The output shaft of the servo system motor extends to the robot planetary gearbox and is connected through a flange. The robot design gearbox has a deformable clamp that can securely grip the shaft of the servo motor when the locking screw is tightened.
The other way is to connect externally through coupling. With this connection method, external coupling is required, so we need servo motors and keyways.
The above is the introduction of robot planetary gearboxes. If you have any other questions, feel free to consult Fubao Gearbox Manufacturer.





Quote Now