 English
English Deutsch
Deutsch Русский
Русский Español
Español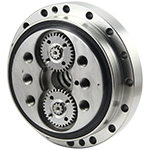







Currently, high-precision cycloidal reducers are widely used in cutting-edge fields such as semiconductor LCD manufacturing equipment, robots, and machine tools that require precise motion control.
With the development of industrial automation, the demand for high-precision cycloidal reducers is increasing day by day. There are mainly two types of high-precision cycloidal reducers: WF series flange output type and WFH hollow shaft type. Since many users are not familiar with these two reducers, they may have difficulty in selecting the appropriate one. Let me explain the differences between these two and help users quickly choose the right high-precision cycloidal reducer.
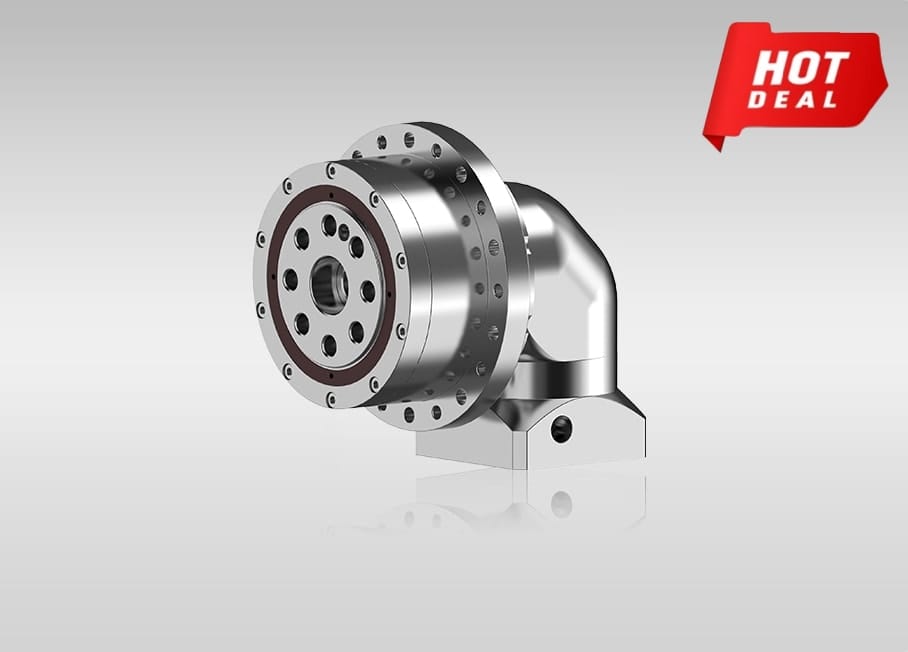
The WF series is a flanged high-precision cycloidal reducer with a wide range of forms. This series of reducers includes precise reduction mechanisms and radial-axial cylindrical roller bearings. The unique design allows the load to directly act on the output flange or housing without the need for additional bearings.
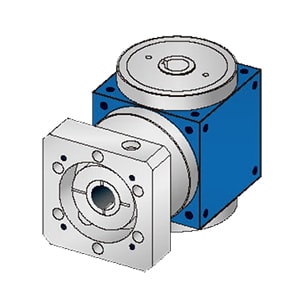
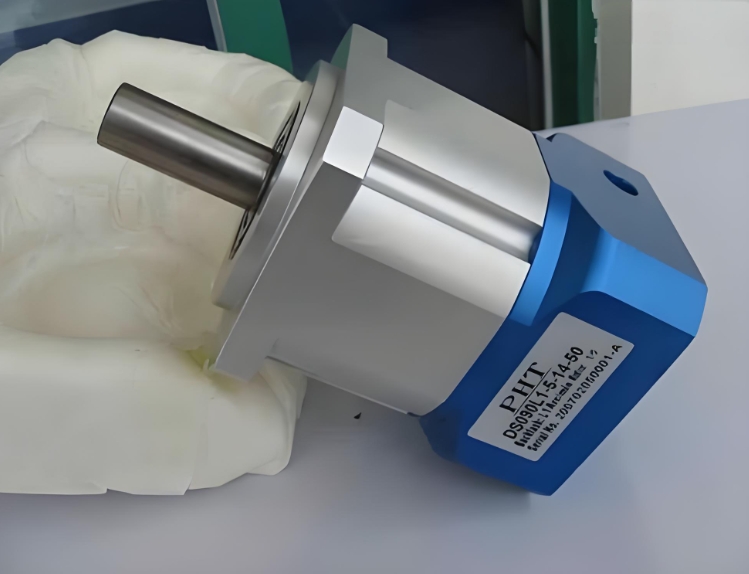
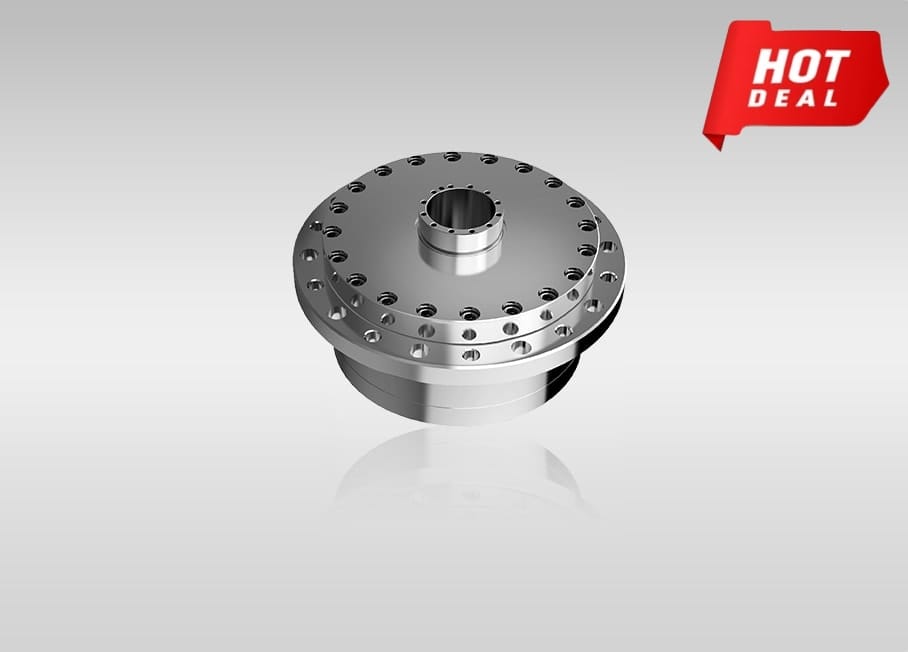
The WF series reducer features modular design, which allows the motor and reducer to be installed through flanges. It belongs to motor-directly-connected reducer. The WFH series is a hollow shaft type of high-precision cycloidal reducer, where wires, compressed air pipes, drive shafts, etc. can pass through the hollow shaft. It is a non-motor-directly-connected reducer.
The WFH series is fully sealed and filled with grease, including precise reduction mechanisms and radial-axial cylindrical roller bearings. The unique design allows the load to directly act on the output flange or housing without the need for additional bearings. From the above introduction, it can be seen that the biggest difference between the WF series and the WFH series is motor-direct connection and non-motor-direct connection.
Motor-directly-connected reducer means connecting the reducer and the motor together. The connection methods mainly include transitional flanges and direct one-stage small gears on the motor output shaft. The motor can be connected to the reducer through either non-standard flanges or transitional flanges.

Non-directly-connected reducer has a compact structure, high efficiency, beautiful appearance, and low noise. It can be installed in any position and can achieve torque limitation through alternative methods. It can also achieve soft start, etc. Motor-direct connection is gear transmission, which features smooth transmission, accurate transmission ratio, reliable operation, high efficiency, long service life, and a wide range of power, speed, and size.
For example, the power transmission can range from small to several hundred thousand kilowatts; the highest speed can reach 300m/s; the gear diameter can range from a few millimeters to more than twenty meters. The disadvantage is that manufacturing gears requires specialized equipment, and meshing transmission will generate noise.
On the other hand, non-directly-connected reducer is belt pulley transmission, which has the following characteristics: it can cushion load impact; it runs smoothly with low noise and vibration; it has a simple structure and convenient adjustment; it is not as strict as meshing transmission in terms of manufacturing and installation accuracy of belt pulleys.





Quote Now