 English
English Deutsch
Deutsch Русский
Русский Español
Español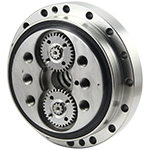







RV reducers play a crucial role in the functionality and precision of various joints in robotic systems. In robotic architectures, the first to fourth joints commonly utilize RV reducers, while the fifth and sixth joints of lightweight robots may opt for harmonic reducers. However, in heavy-duty robotic applications, all joints necessitate the use of RV reducers. On average, each robot incorporates approximately 4.5 RV reducers. In 2013, the global sales of robots reached 180,000 units, requiring around 900,000 reducers.
Industrial robots are typically powered by AC servo motors, capable of speed control through pulse signals. Despite this inherent speed control feature, the need for reducers in industrial robots arises due to specific requirements. Industrial robots often perform repetitive actions to complete identical processes. To ensure reliable task execution and process quality, precise positioning and repeatability are paramount. RV reducers or harmonic reducers are employed to enhance and ensure the accuracy of industrial robots.
The role of precision reducers in industrial robots extends beyond precision to the transmission of higher torques. When dealing with heavier loads, simply increasing the power of the servo motor proves inefficient. Reducers facilitate the enhancement of output torque within an appropriate speed range. Additionally, servo motors tend to generate heat and low-frequency vibrations during low-frequency operation, which is not conducive to the prolonged and cyclical operation required by industrial robots for accurate and reliable performance.
The presence of precision reducers enables servo motors to operate at suitable speeds, precisely reducing the speed to match the requirements of different parts of the industrial robot. This not only improves mechanical rigidity but also delivers larger torque output. Compared to general-purpose reducers, robotic joint reducers must be characterized by a short transmission chain, compact size, high power, lightweight, and ease of control.
Two prominent types of reducers widely applied in joint-type robots are RV reducers and harmonic reducers. In comparison to harmonic reducers, RV reducers offer higher stiffness and rotational precision. Therefore, RV reducers are typically positioned in heavy-load locations such as the robot base, large arm, and shoulder joints. In contrast, harmonic reducers are commonly placed in the forearm, wrist, or hand due to their advantages in certain applications. Planetary reducers are generally utilized in Cartesian-coordinate robots.
Moreover, RV reducers demonstrate significantly higher fatigue strength, stiffness, and lifespan compared to harmonic transmissions. Unlike harmonic transmissions, the backlash accuracy of RV reducers remains stable over time, making them a preferred choice for precision robot transmissions. Consequently, RV reducers are gradually replacing harmonic reducers in advanced robot transmissions worldwide, showcasing the trend of their increasing prominence in robotics.




Quote Now