 English
English Deutsch
Deutsch Русский
Русский Español
Español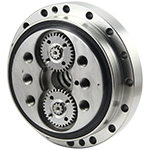








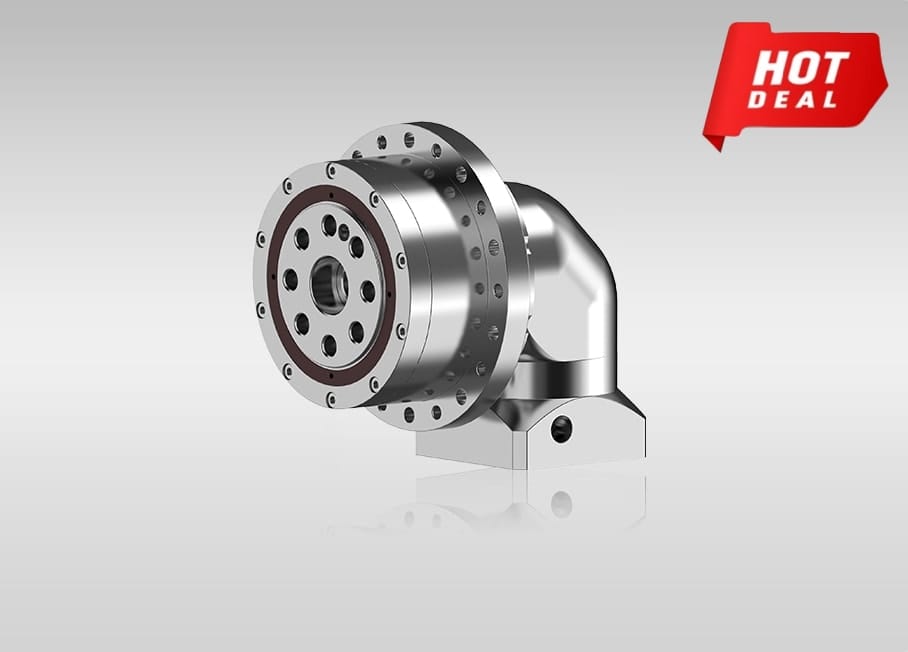
The accumulation of displacement errors and gaps in the joints of multi-joint industrial robots has a great influence on the accuracy of the front-end unit of the manipulator, so the performance of the reducer must give consideration to "high torque that can rotate smoothly even under heavy load" and "high accuracy with small gaps in the joints".
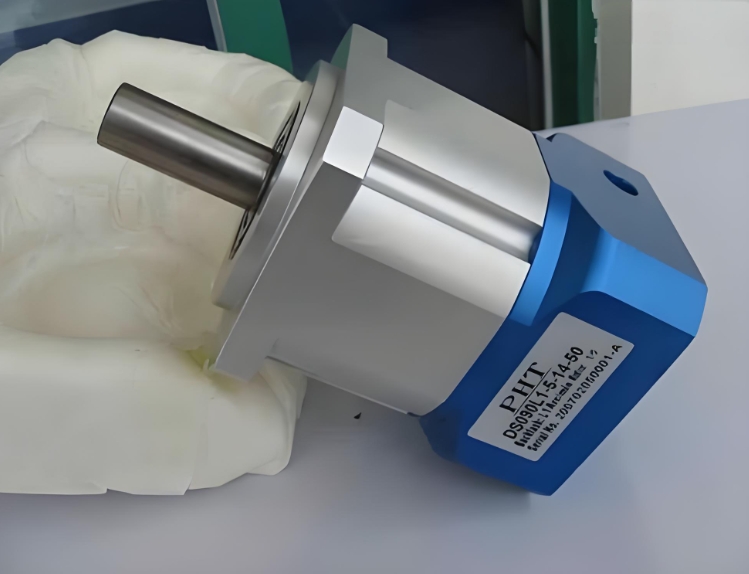
The backlash of the new generation robot reducer can reach 0.5 arc minutes, the rated torque is as high as 400Nm, and the machine body is compact, but it can realize high-precision and powerful driving.
Because the new generation robot reducer rotates not only with cycloid wheel, but also with the needle roller rotating 360, which can offset the impact force from the outside to a great extent, so that it can bear the strength of 5 times the rated torque.
When starting and stopping, the allowable torque can also reach 2.5 times of the rated torque, giving consideration to high torque, high rigidity and high precision. Solve a series of chain reactions caused by displacement and clearance of multi-joint industrial robots.
So, what are the characteristics of the new generation robot reducer, and what impact can its application bring to multi-joint industrial robots?
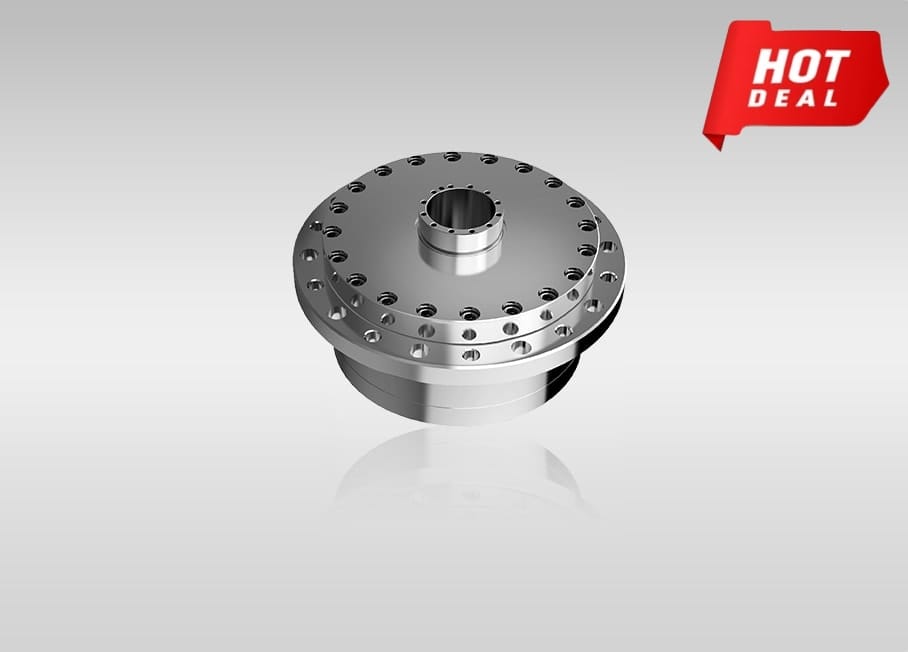
The new generation robot reducer is a kind of precision transmission device with harmonic cycloidal structure. It adopts a unique deceleration principle, and the result represents a new generation of power transmission system. Compared with the harmonic reducer commonly used by robots, it has higher rigidity and torque output, which means that it can be applied to industrial robots with large loads, especially those with a weight of more than 15~50kg.
The robot reducer is a forward-looking mechanical transmission device, which brings a new choice for the development of robot technology. People have more choices when facing the application requirements of high rigidity, high precision and small volume.
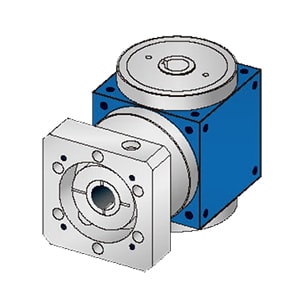
And no longer worry about the defect of insufficient rigidity of harmonic reducer. Its innovative deceleration principle and the combination of ultra-thin high-strength crossed roller bearings make it outstanding in high precision, low backlash, high rigidity and small volume.
To sum up, as a new generation of power transmission system, the robot reducer is compact and compact, which coincides with the development trend of miniaturization and lightweight at present, and is especially suitable for industrial robots, humanoid robots and other fields.
With the continuous progress of technology, we have reason to believe that the reducer will continue to promote the development of robot technology and open up new possibilities for future robot applications.




Quote Now