 English
English Deutsch
Deutsch Русский
Русский Español
Español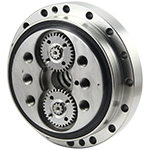







In industrial robotics, there are several commonly used types of reducers:
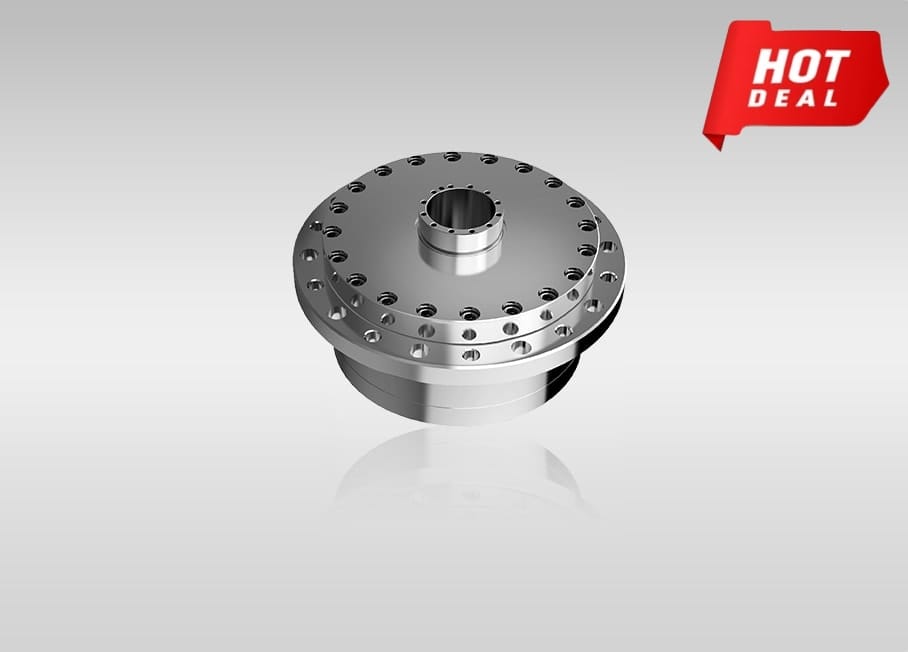
1. RV Reducer
The RV reducer mechanism is a novel transmission mechanism based on the traditional rotating planetary wheel pinion gear. It is widely applied in the joints of industrial robots due to its high efficiency. The power of the Servo engine in industrial robots is transmitted through gears on the input shaft of the reducer, resulting in a reduction in speed. The ratio of teeth and gears determines the percentage of transmission efficiency.

2. Harmonic Reducer
The harmonic reducer is a new transitional mechanism in the gear system and is typically used in industrial robots with minimal loads. It consists of elastic and rigid wheel gear generators, offering slightly higher utility than flexible wheel systems. The harmonic reducer exhibits significant driving advantages, such as compact size, fewer components, a single engine range of 50-4000%, and a transmission efficiency of 92-96%.

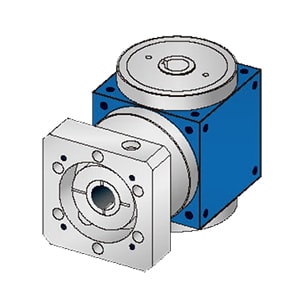
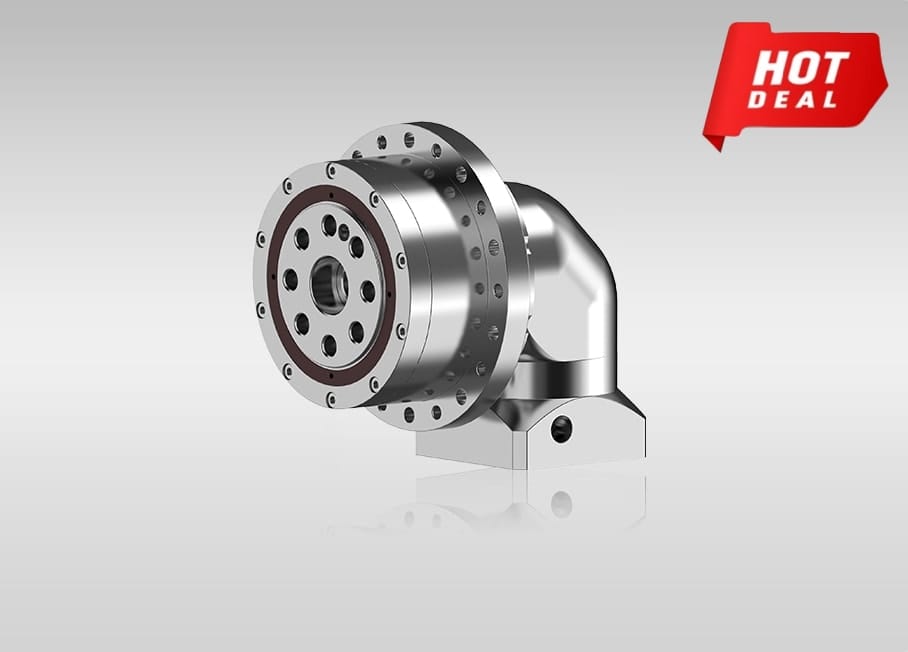
3. Planetary Reducer
In simple terms, the planets in the planetary reducer revolve around the sun, much like the planets in our solar system. The planetary reducer, also known as a planetary gear system, functions as a reducer to lower the rotational speed of the engine, thereby increasing torque in industrial robots.
The working principle of the planetary reducer involves reducing gears. When the sun rotates under the driving force, the engagement of the planetary wheels causes them to rotate. Simultaneously, the other side of the planetary wheels works together with the internal ring and circular gears on the inner wall of the housing, allowing the planetary wheels to rotate in the same direction as the driving frame along the sun wheel's rotation direction within the driving force. This creates a revolution motion of the internal ring and circular gears. The wheel revolving around the sun represents one revolution.
Industrial robots typically use RV reducers, harmonic reducers, and planetary reducers. RV reducers offer suitable speed control for Servo engines, reducing the speed to the desired level for each component of the industrial robot while increasing the generated torque.





Quote Now