 English
English Deutsch
Deutsch Русский
Русский Español
Español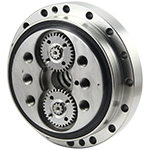







I. Operational Characteristics of Industrial Robots Industrial robots are multifunctional, multi-degree-of-freedom electromechanical integrated automatic machinery and systems that can complete certain operational tasks in the manufacturing process through repetitive programming and automatic control. They can be integrated with manufacturing hosts or production lines to form single or multiple machine automation systems.
They can perform various production operations such as handling, welding, assembly, and spraying without human involvement. The image below shows an industrial robot operating on a production line. Currently, industrial robot technology and industry are rapidly developing and are increasingly being widely applied in production. They have become important highly automated equipment in modern manufacturing.
II. Characteristics of Industrial Robots Since the first generation of robots was introduced in the United States in the early 1960s, the development and application of industrial robots have made rapid progress.
The most significant characteristics of industrial robots can be summarized as follows:
1. Programmability
The further development of production automation is flexible automation. Industrial robots can be reprogrammed to adapt to changes in their working environment. Therefore, they can play a significant role in flexible manufacturing processes that involve small batch production with high efficiency. They are an important component of Flexible Manufacturing Systems (FMS).
2. Human-like features
Industrial robots have mechanical structures that resemble human walking, waist rotation, upper arm, forearm, wrist, and hand claw. They are controlled by computers. In addition, intelligent industrial robots also have many human-like "biological sensors," such as skin-type contact sensors, force sensors, load sensors, vision sensors, auditory sensors, language capabilities, etc. These sensors enhance the adaptability of industrial robots to the surrounding environment.
3. Versatility
In addition to specialized industrial robots, general-purpose industrial robots have good versatility in performing different tasks. For example, by changing the end effector (gripper, tool, etc.) of the industrial robot, it can perform different tasks.
4. Mechatronics integration
Industrial robot technology involves a wide range of disciplines, but it can be summarized as the combination of mechanical engineering and microelectronics - mechatronics integration. Third-generation intelligent robots not only have various sensors to acquire information about the external environment but also possess artificial intelligence capabilities such as memory, language understanding, image recognition, reasoning, and judgment.
These capabilities are closely related to the application of microelectronics technology, especially computer technology. Therefore, the development of robot technology will drive the development of other technologies, and the level of development and application of robot technology can also verify a country's scientific, technological, and industrial development level.
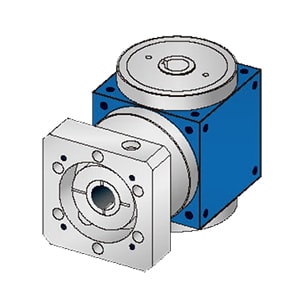
In summary, the industrial robot system consists of three main parts: mechanical part, sensing part, and control part. The six subsystems are the drive system, mechanical structure system, sensing system, robot-environment interaction system, human-robot interaction system, and control system. These subsystems work together to enable the industrial robot to perform various tasks in a flexible and efficient manner. The mechanical structure system includes components such as the hand, wrist, arm, and body, while the drive system provides the necessary power for the robot's motion.




Quote Now