 English
English Deutsch
Deutsch Русский
Русский Español
Español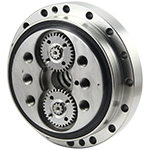







Robots, as intelligent devices capable of performing various tasks in place of humans, have been widely applied in industries such as manufacturing, healthcare, and defense. The joint transmission system of a robot plays a crucial role in its motion, and the reducer, as an important component of the joint transmission system, significantly impacts the robot's performance and technical level. Currently, two main types of reducers are commonly used in robots: harmonic drives and ordinary gear reducers.
1)Structural Comparison
1. A harmonic drive is a high-precision reducer based on the principle of flexible gearing. Its structure consists of three main parts: a rigid gear, a wave generator, and a flexspline. During operation, the rigid gear remains fixed, with its teeth uniformly distributed around it, while the flexspline, which has fewer teeth than the rigid gear, rotates in the opposite direction by a corresponding angle for every revolution of the rigid gear. The wave generator, with an elliptical profile, supports the flexspline and drives its rotation, causing it to undergo plastic deformation. During rotation, only a few teeth of the flexspline at the elliptical end engage with the rigid gear, allowing the flexspline to rotate freely by a certain angle relative to the rigid gear.
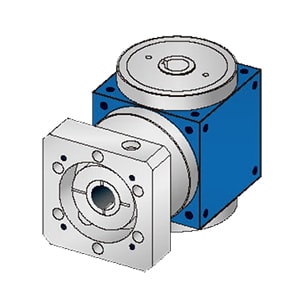
On the other hand, an ordinary gear reducer is composed of gears, bearings, and a housing. In comparison, the structure of a harmonic drive is more complex, but it also possesses higher precision and reliability.
2. Transmission Efficiency Comparison: The transmission efficiency of a harmonic drive is typically above 90%, while that of an ordinary gear reducer is around 80%. This is because the harmonic drive utilizes the transmission principle of flexible gearing, reducing energy loss during the transmission process.
3. Precision Comparison: The precision of a harmonic drive is usually below 1 arc minute, whereas that of an ordinary gear reducer is around 5 arc minutes. This is because the harmonic drive, employing the transmission principle of flexible gearing, achieves higher precision and repeatability in positioning.
4. Comparison of Load Capacity
The load capacity of a harmonic reducer is typically above 1000N.m, while a regular reducer has a load capacity of around 500N.m. This is because the harmonic reducer utilizes the flexible gear transmission principle, which provides higher load capacity.
2) Performance of Harmonic Reducers
-
High Precision
The harmonic reducer, with its flexible gear transmission principle, achieves higher precision and repeatability. This enables the robot to control its position and posture more accurately during movement.
-
High Load Capacity
The flexible gear transmission principle of the harmonic reducer allows it to handle higher loads. This enhances the robot's capability and stability in performing tasks.
-
High Transmission Efficiency
The transmission efficiency of the harmonic reducer is usually above 90%, reducing energy loss during transmission. This enables the robot to utilize energy more efficiently, improving its overall work efficiency.
-
High Reliability
Despite its complex structure, the harmonic reducer also provides higher reliability. By reducing friction and wear during transmission, the flexible gear transmission principle prolongs the lifespan of the robot.
Based on the above comparison, robots require compact size and high precision. The harmonic reducer maximizes technical performance in terms of high precision, small clearance, large reduction ratio, and compact size, meeting the flexibility requirements of small and medium-sized robots. Consequently, due to the widespread use of harmonic reducers in robot joints, industrial robots are known for their exceptional repeatability. Modern industrial robots can achieve sub-micron repeatability in thousands of repetitive cycles. For example, the following video demonstrates a repeatability test of a single-axis robot using a certain brand of harmonic reducer, with a measured repeatability of less than 1 micron (0.001 millimeters).
3) Conclusion
Compared to regular reducers, robots equipped with harmonic reducers exhibit higher precision, load capacity, transmission efficiency, and reliability. Therefore, selecting an appropriate reducer is crucial for enhancing the performance and technological capabilities of robots in both development and application.





Quote Now